|
Here is a neat look at the technologies, prototypes, and innovations of the company behind the Roomba: iRobot.
0 Comments
For a mobile robot, the measurement of distance is an important piece of information needed for it to help determine where it is in the world. It is also very important to keep it from running into things. Gamma can now measure the distance in front of it to the nearest object. It does this using the Ping))) sensors mounted on the front of it. Since Gamma uses the Propeller as its processor the code for the ping can be found in the OBEX. This takes the complexities of converting microseconds between pulses to lines as simple as "range := ping.Inches(PING_CENTER)" where "range" is the variable for storing the distance, and "PING_CENTER" is the IO pin that the ping is connected to. Click "Read More" to see (and download) a sample program that reads the distances from 3 pings and displays them on the terminal. Note: this requires use of the Parallax Serial Terminal library.
The Stingray platform is a robotics development platform from Parallax. I will be using this platform to expand my knowledge of robotics and explore my interests in mobile robotics and mapping. In order to do that Gamma (as every good robot needs a name) has been equipped with 3 Parallax Ping sensors. These sensors use ultrasonic pulses to measure distance to other objects. More about this as the investigation continues. 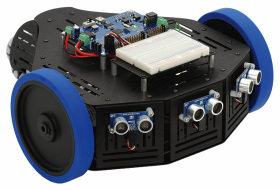 |
AuthorJon owner AboutThis blog covers a multitude of up and coming technology, as well as how to guides, tips and tricks, and other interesting technology related items.
Archives
January 2016
Categories
All
|
 RSS Feed
RSS Feed

